
Данные, собираемые при посещении сайта
Персональные данные
Эти данные собираются в целях оказания услуг или продажи товаров, связи с пользователем или иной активности пользователя на сайте, а также, чтобы отправлять пользователям информацию, которую они согласились получать.
Мы не проверяем достоверность оставляемых данных, однако не гарантируем качественного исполнения заказов или обратной связи с нами при некорректных данных.
Данные собираются имеющимися на сайте формами для заполнения (например, регистрации, оформления заказа, подписки, оставления отзыва, обратной связи и иными).
Формы, установленные на сайте, могут передавать данные как напрямую на сайт, так и на сайты сторонних организаций (скрипты сервисов сторонних организаций).
Также данные могут собираться через технологию cookies (куки) как непосредственно сайтом, так и скриптами сервисов сторонних организаций. Эти данные собираются автоматически, отправку этих данных можно запретить, отключив cookies (куки) в браузере, в котором открывается сайт.
Не персональные данные
Кроме персональных данных при посещении сайта собираются не персональные данные, их сбор происходит автоматически веб-сервером, на котором расположен сайт, средствами CMS (системы управления сайтом), скриптами сторонних организаций, установленными на сайте. К данным, собираемым автоматически, относятся: IP адрес и страна его регистрации, имя домена, с которого вы к нам пришли, переходы посетителей с одной страницы сайта на другую, информация, которую ваш браузер предоставляет добровольно при посещении сайта, cookies (куки), фиксируются посещения, иные данные, собираемые счетчиками аналитики сторонних организаций, установленными на сайте.
Эти данные носят неперсонифицированный характер и направлены на улучшение обслуживания клиентов, улучшения удобства использования сайта, анализа посещаемости.
Использование индуктивностей
Если клонировать схему, можно получить плавный пуск, используя несколько групп резисторов, соединенных параллельно, что облегчит их температурную нагрузку. Но увеличение времени плавного пуска будет сопровождаться увеличением потерь энергии в этих резисторах. По этой причине вместо резисторов применяются индуктивные элементы. В простейшем случае это дроссели. Это более громоздкое и дорогостоящее решение, но ради снижения потерь энергии из-за частых повторных пусков движков приходится его применять. Внешний вид реактора для мощного асинхронного движка представлен ниже.

Пусковой реактор мощного асинхронного двигателя
Если индуктивность, используемую при запуске, выполнить в виде автотрансформатора с подвижным контактом, перемещающимся по виткам обмотки, можно либо оптимально отлаживать процесс пуска, либо управлять им, перемещая подвижный контакт. Недостатком этого варианта будет неизбежное искрение в механическом контакте. По этой причине он применим лишь при сравнительно малых мощностях движков. Схемы устройств плавного пуска с реакторами и автотрансформаторами показаны далее.
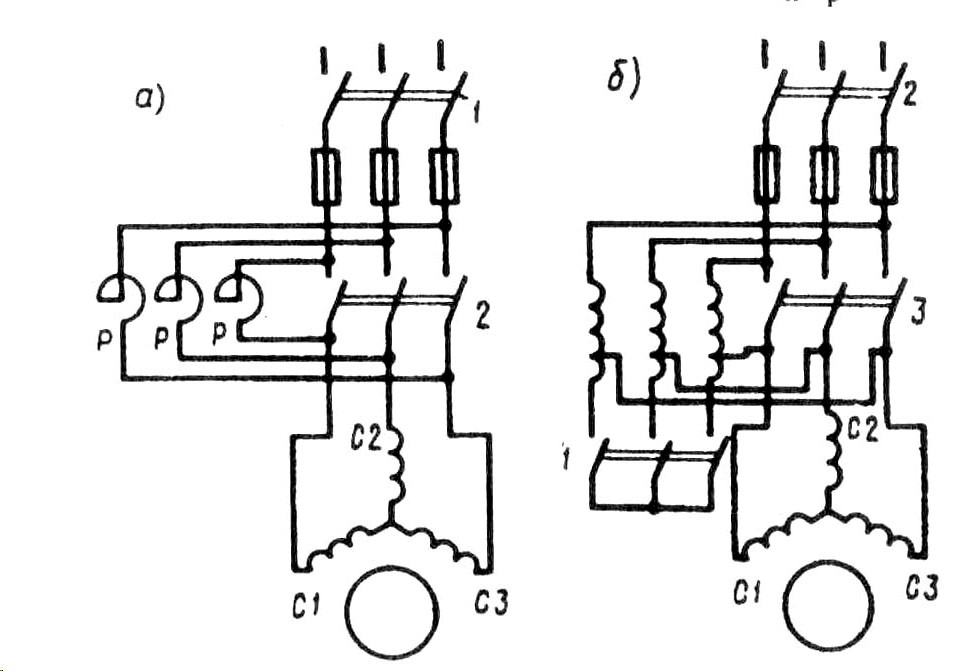
Схема плавного пуска
Схемы плавного пуска:
а) с реакторами;
б) с автотрансформаторами.
1, 2 и 3 – коммутаторы, управляющие переключением
Для плавного пуска без недостатков, присущих автотрансформаторам с их подвижным контактом, используются магнитные усилители. В них применено подмагничивание, которое позволяет изменять величину индуктивного сопротивления. Конструкция магнитных усилителей довольно-таки разнообразна. Но их главное преимущество – это малый ток и, соответственно, мощность, используемая для управления. В них нет регулировочных контактов, по которым текут большие токи. Одна из схем показана далее.

Схема усилителя
Процесс регулирования пуска
Сроки включения SCR — это ключ к управлению выходом напряжения для УПП. В течение пуска логическая схема УПП определяет, когда включить SCR. Он не включает SCR в точке, где напряжение идёт от отрицательного к положительному, но ждёт некоторое время после этого. Это известный процесс, называемый как «постепенное восстановление» SCR. Точка включения SCR установлена или запрограммирована тем, что начальный крутящий момент, начальный ток или ограничение тока строго регулируется.
 Результат поэтапного восстановления SCR представляет собой несинусоидальное пониженное напряжение на выводах двигателя, которое показано на рисунках. Поскольку двигатель является индуктивным, а ток отстаёт от напряжения, SCR остаётся включённым и проводит, пока ток не достигнет нуля. Это происходит после того, как напряжение стало отрицательным. Выход напряжения индивидуального SCR.
Результат поэтапного восстановления SCR представляет собой несинусоидальное пониженное напряжение на выводах двигателя, которое показано на рисунках. Поскольку двигатель является индуктивным, а ток отстаёт от напряжения, SCR остаётся включённым и проводит, пока ток не достигнет нуля. Это происходит после того, как напряжение стало отрицательным. Выход напряжения индивидуального SCR.
Если сравнивать с формой полного напряжения, можно видеть, что пиковое напряжение совпадает с полным волновым напряжения. Однако ток не увеличивается до того же уровня, что и при приложении полного напряжения из-за индуктивного характера двигателей. Когда это напряжение подаётся на двигатель, выходной ток выглядит, как на рисунке.
Способы настроек устройства

Первый способ — общий
В устройстве имеетсявыбор способа предотвращения остановки двигателя во время торможения:
- Первый способ — общий. Торможение прекращается, как только напряжение шины постоянного тока превысит уровень предотвращения остановки.
- Второй способ — интеллектуальный. Максимально быстрое торможение без отказов из-за перенапряжения.
- Третий способ — предотвращение остановки двигателя с помощью тормозного резистора. Предотвращение остановки двигателя во время торможения включается в координации с динамическим торможением.
- Четвертый способ — торможение при работе с перевозбуждением. Торможение происходит по мере увеличения плотности потока магнитного поля электродвигателя.
- Пятый способ — торможение при работе с перевозбуждением 2. Скорость торможения регулируется в соответствии с напряжением шины постоянного тока. Шестой способ — замедляет регулирование скорости торможения в соответствии с выходным током и напряжением шины постоянного тока.
 Для установки необходимых параметров устройства используется автоматическая настройка асинхронного электродвигателя. Способы настройки двигателя: первый — стационарная настройка для междуфазного сопротивления; второй — вращательная автонастройка для частотного управления ( необходима для работы функций энергосбережения, оценки скорости и поиска скорости); третий — инерционная настройка ( перед инерционной настройкой необходимо выполнить вращательную настройку); четвёртый — настройка коэффициента усиления ASR ( перед настройкой своими руками необходимо выполнить вращательную автонастройку).
Для установки необходимых параметров устройства используется автоматическая настройка асинхронного электродвигателя. Способы настройки двигателя: первый — стационарная настройка для междуфазного сопротивления; второй — вращательная автонастройка для частотного управления ( необходима для работы функций энергосбережения, оценки скорости и поиска скорости); третий — инерционная настройка ( перед инерционной настройкой необходимо выполнить вращательную настройку); четвёртый — настройка коэффициента усиления ASR ( перед настройкой своими руками необходимо выполнить вращательную автонастройку).
Способы плавного пуска асинхронных двигателей
Кроме негативного влияния на цепи питания и окружение, стартовый импульс электродвигателя вреден и для его обмоток статора, ведь момент увеличенной силы при запуске прикладывается к обмоткам. То есть, сила рывка ротора усиленно давит на обмоточные провода, тем самым убыстряя износ их изоляции, пробой которой называют межвитковым замыканием.
 Иллюстрация принципа действия асинхронного электродвигателя
Иллюстрация принципа действия асинхронного электродвигателя
Поскольку конструктивно нельзя уменьшить пусковой ток, придуманы способы, схемы и аппараты, обеспечивающие плавный пуск асинхронного двигателя. В большинстве случаев, на производствах с мощными линиями питания и в быту данная опция не является обязательной – так как колебания напряжения и пусковые вибрации не оказывают существенного влияния на производственный процесс.
 Графики изменения токов при прямом запуске и при помощи устройств плавного пуска
Графики изменения токов при прямом запуске и при помощи устройств плавного пуска
Но существуют технологии, требующие стабильных, не превышающих норм параметров, как электроснабжения, так и динамических нагрузок. Например – это может быть точное оборудование, работающее в одной сети с чувствительными к напряжению потребителями электроэнергии. В этом случае, для соблюдения технологических норм для мягкого запуска электродвигателя применяют различные способы:
- Переключение звезда – треугольник;
- Запуск при помощи автотрансформатора;
- устройства плавного пуска асинхронного двигателя (УПП).
В приведенном ниже видео перечислены основные проблемы, возникающие при запуске электродвигателя, а также описаны достоинства и недостатки различных устройств плавного пуска асинхронных электродвигателей с короткозамкнутым ротором.
 Промышленные софт стартеры для электродвигателей различной мощности
Промышленные софт стартеры для электродвигателей различной мощности
Ознакомление с принципом плавного запуска
Для того, чтобы осуществить плавный пуск асинхронного электродвигателя максимально эффективно и с минимальными затратами, приобретая готовые софт стартеры, необходимо прежде ознакомиться с принципом действия подобных устройств и схем. Понимание взаимодействия физических параметров позволит сделать оптимальный выбор УПП.
Для плавного пуска асинхронного электродвигателя необходимо уменьшить пусковой ток, что позитивно скажется как на нагрузке электросети, так и на динамических перегрузках обмоток двигателя и приводных механизмов. Достигают уменьшения пускового тока, снижая напряжение питания электродвигателя. Заниженное пусковое напряжение используется во всех трех предложенных выше способах. Например, при помощи автотрансформатора пользователь самостоятельно занижает напряжение при запуске, поворачивая ползунок.
 Понижая напряжение на старте можно добиться плавного запуска електродвигателя
Понижая напряжение на старте можно добиться плавного запуска електродвигателя
При использовании переключения «звезда-треугольник» меняется линейное напряжение на обмотках электродвигателя. Переключение осуществляется при помощи контакторов и реле времени, рассчитанное на время запуска электродвигателя. Подробное описание плавного пуска асинхронного электродвигателя при помощи переключения «звезда-треугольник» имеется на данном ресурсе по указанной ссылке.
 Схема переключения «звезда-треугольник» с использованием контакторов и реле времени
Схема переключения «звезда-треугольник» с использованием контакторов и реле времени
Теория осуществления плавного запуска
Для понимания принципа плавного старта необходимо понимание закона сохранения энергии, необходимой для раскрутки вала ротора электромотора. Упрощенно можно считать энергию разгона пропорциональной мощности и времени, E = P*t, где P – мощность, равная умножению силы тока на напряжение (P = U*I). Соответственно, E = U*I *t. Поскольку для уменьшения пускового момента и снижения нагрузок на сеть необходимо уменьшить стартовый ток I, то сохраняя уровень потраченной энергии нужно увеличить время разгона.
 Звигатель с фозім ротором, необходим для оборудования с тіжелім запуском
Звигатель с фозім ротором, необходим для оборудования с тіжелім запуском
Также необходимо учитывать, что во время мягкого запуска происходит увеличенный нагрев обмоток и электронных силовых ключей пускового устройства. Для охлаждения полупроводниковых ключей необходимо использование массивных радиаторов, которые увеличивают стоимость аппарата. Поэтому уместно использование УПП для кратковременного разгона двигателя с дальнейшим шунтированием ключей прямым напряжением сети. Подобный режим (переключение байпас) делает компактней и дешевле электронное устройство плавного пуска асинхронных двигателей, но ограничивает количество запусков в определенном интервале ввиду требуемого времени для охлаждения ключей.
 Структурная схема шунтирования силовых полупроводниковых ключей (байпас)
Структурная схема шунтирования силовых полупроводниковых ключей (байпас)
Для чего нужен плавный пуск?
Казалось бы, все правильно, да и оборудование на это рассчитано. Вот только всегда есть «но». В нашем случае их несколько:
в момент запуска электродвигателя, ток питания может превышать номинальный в четыре с половиной-пять раз, что приводит к значительному нагреву обмоток, а это не очень хорошо;
старт двигателя прямым включением приводит к рывкам, которые в первую очередь влияют на плотность тех же обмоток, увеличивая трение проводников во время работы, ускоряет разрушение их изоляции и, со временем, может привести к межвитковому замыканию;
вышеупомянутые рывки и вибрация передаются на весь приводимый в движение агрегат. Это уже совсем нездорово, потому что может привести к повреждению его движущихся элементов: систем зубчатых передач, приводных ремней, конвейерных лент или просто представьте себя едущим в дёргающемся лифте. В случае насосов и вентиляторов — это риск деформации и разрушения турбин и лопастей;
не стоит также забывать об изделиях, возможно находящихся на производственной линии
Они могут упасть, рассыпаться или разбиться из-за такого рывка;
ну, и наверно, последний из моментов, заслуживающих внимание — стоимость эксплуатации такого оборудования. Речь идёт не только о дорогостоящих ремонтах, связанных с частыми критическими нагрузками, но и об ощутимом количестве не эффективно израсходованной электроэнергии.
Казалось бы, все вышеперечисленные сложности эксплуатации присущи лишь мощному и громоздкому промышленному оборудованию, однако, это не так. Все это может стать головной болью любого среднестатистического обывателя. В первую очередь это касается электроинструмента.
Специфика применения таких агрегатов, как электролобзики, дрели, болгарки и им подобных, предполагают многократные циклы запуска и остановки, в течение относительно небольшого промежутка времени. Такой режим эксплуатации, в той же мере, влияет на их долговечность и энергопотребление, как и у их промышленных собратьев. При всем этом не стоит забывать, что системы плавного запуска не могут регулировать рабочие обороты мотора или реверсировать их направление. Также невозможно увеличить пусковой момент или снизить ток ниже, чем требуется для начала вращения ротора электродвигателя.
Описание
УПП представляют собой выполненные в едином корпусе устройства, обеспечивающие задание входного сигнала для поверяемых ИП, приборов, каналов телемеханики и поверку ИП, приборов. Входные и выходные сигналы, основная приведенная погрешность поверяемых ИП, приборов, выраженная в процентах, отображаются на цифровом табло (далее – табло) УПП.
На табло УПП в зависимости от поверяемого ИП, прибора, канала телемеханики отображаются необходимые параметры:
– значение сигнала, подаваемого на вход ИП, прибора, канала телемеханики;
– значение сигнала проверяемой точки прибора;
– значение выходного аналогового сигнала поверяемого ИП, прибора;
– основная погрешность выходного аналогового сигнала поверяемого ИП, прибора со знаком ” – ” (в случае отрицательного значения);
– основная погрешность прибора на заданной точке шкалы со знаком ” – ” (в случае отрицательного значения);
– сигнал интерфейса RS-485 (далее – сигнал интерфейса) поверяемого ИП, прибора.
В качестве корпуса УПП использован пластиковый кейс. Кейс закрывается на 2
замка и имеет ручку для переноски.
На внутренней поверхности крышки кейса в кармане размещается эксплуатационная документация УПП в соответствии с комплектом поставки.
Жгуты, сетевой кабель и заглушка, поставляемые в комплекте с УПП, помещаются также во внутренний карман кейса.
Фотография общего вида УПП приведена на рисунке 1.
Схема пломбировки от несанкционированного доступа и указание мест для нанесения оттисков клейм отдела технического контроля (далее – ОТК) и поверителя на лицевой панели УПП приведена на рисунке 2.
1 – место для нанесения оттиска клейма поверителя,
2 – место для нанесения оттиска клейма ОТК.
Рисунок 2 – Схема пломбировки от несанкционированного доступа и указания мест для нанесения оттисков клейм ОТК и поверителя на лицевой панели УПП
Поверка
Поверка осуществляется в соответствии с документом «Установки поверочные переносные УПП8531М. Методика поверки МП. ВТ. 151 – 2006»
Перечень основного оборудования для поверки:
– преобразователь измерительный эталонный ЦП7009, диапазоны измерений: напряжения – от 0 до 100 В, тока – от 0 до 5 А, частота входных сигналов – от 45 до 65 Гц, основная погрешность ± 0,05 %;
– установка поверочная полуавтоматическая универсальная УППУ-1М, диапазоны измерений: ток от 10 мА до 10 А, напряжение от 1 до 750 В, пределы допускаемой основной приведенной погрешности по току и напряжению ±0,03 %; по мощности ± 0,04%;
– калибратор программируемый П320, диапазон изменений калиброванных токов от 10-9 до 10-1 А, основная погрешность ± 0,015 %;
– компаратор напряжений Р3003, диапазон измерений от 0,01 мВ до 11,11 В, класс точности 0,0005;
– магазин сопротивлений РЗЗ, диапазон сопротивлений от 0,1 до 99999,9 Ом, класс точности 0,2;
– мера электрического сопротивления однозначная Р3030, сопротивление 100 Ом, класс точности 0,002.
Нормативные технические документы, устанавливающие требования к установкам поверочным переносным УПП8531М
ГОСТ 12997-84. Изделия ГСП. Общие технические условия;
ГОСТ 12.2.091-2002. Безопасность электрических контрольно-измерительных приборов и лабораторного оборудования. Общие требования;
ТУ BY 300080696.032-2006. Установки поверочные переносные УПП8531М. Технические условия;
МП. ВТ. 151 – 2006. Установки поверочные переносные УПП8531М. Методика поверки.
ПЛАВНЫЙ ПУСК АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
Логичным способом снижения пускового тока стало снижение напряжения, подаваемого на статор в момент запуска, с его постепенным увеличением при разгоне двигателя.
Простейший и наиболее старый способ плавного пуска – реостатный пуск электродвигателя: в цепь статора последовательно включается несколько мощных резисторов, последовательно закорачиваемых контакторами.
Также могут использоваться и дроссели высокой индуктивности (реакторы), а также автотрансформаторы.
Подобный способ плавного пуска имеет очевидные недостатки:
Проблематичность автоматизации.
Работа контакторов не привязывается к реальному значению тока, они либо переключаются вручную, либо перебираются с помощью реле времени автоматически.
Усложнение пуска под нагрузкой.
Так как крутящий момент асинхронного двигателя пропорционален квадрату напряжения питания, снижение напряжения в момент пуска в 2 раза приведет к снижению крутящего момента в 4 раза. Применение плавного пуска с электродвигателями, напрямую подключенными к нагрузке, значительно увеличивает время выхода на рабочие обороты.
Совершенствование силовой электроники позволило создать компактные автоматические устройства плавного пуска (также называемые софтстартерами от английского soft start – «мягкий пуск») для асинхронных электродвигателей, устанавливаемые на стандартную монтажную рейку электрощитов. Они обеспечивают не только плавный разгон, но и торможение двигателя, позволяя регулировать параметры токов пуска и остановки в различных режимах:
- Постоянное токоограничение.
В момент запуска ток ограничивается на заданном превышении номинального и удерживается на этой величине все время разгона двигателя. Обычно используется ограничение на уровне 200-300% номинального тока. Перегрузка становится малозначительной, хотя ее длительность возрастает.
Формирование тока.
В данном случае токовая кривая в момент включения двигателя имеет больший наклон, после чего софтстартер переходит в режим токоограничения.
Такой метод плавного пуска применяется при подключении к маломощным подстанциям или генераторам для снижения стартовой нагрузки, однако пусковой момент электродвигателя в данном случае минимален. Для устройств, лишенных холостого хода электродвигателя, использовать формирование тока с пологой стартовой кривой невозможно.
Ускоренный пуск (кик-старт).
Применяется с двигателями, напрямую приводящими нагрузку, так как иначе их пусковой крутящий момент может оказаться недостаточным для страгивания ротора.
В этом случае устройство плавного пуска допускает кратковременное превышение пускового тока в несколько раз (фактически осуществляется прямая коммутация), по истечении заданного времени ток снижается до двух-трехкратного превышения номинала.
Останов на выбеге.
При отключении двигателя напряжение с него снимается полностью, вращение якоря продолжается по инерции. Наиболее простой способ коммутации, применимый при небольших мощностях и малой инерции привода.
Однако в момент разрыва цепи происходит сильный индуктивный выброс, приводящий к сильному искрению в контакторах. На мощных электродвигателях, а также при высоких рабочих напряжениях данный способ отключения неприемлем.
Линейное снижение напряжения.
Применяется для более плавной остановки двигателя. Нужно помнить, что крутящий момент двигателя при этом снижается нелинейно из-за квадратичной зависимости момента от напряжения, то есть снижение момента происходит наиболее резко в начале кривой.
Отключение питания происходит при минимальном токе в обмотке, соответственно коммутирующие выключатели практически не изнашиваются образованием искры между контактами.
Для снижения нагрузок при остановке применяется управляемое снижение напряжения:
- вначале ток снижается минимально;
- затем кривая начинает снижаться круче.
Снижение крутящего момента электродвигателя при этом близко к линейному. Этот способ управления остановом электродвигателя применяется в устройствах с высокой инерционностью привода.
При использовании такого рода устройств плавного пуска пусконаладочные работы заключаются в настройке нужного типа кривой пускового тока и, в случае использования режимов формирования тока или ускоренного старта, настройке длительности временного интервала начального участка кривой.
Применение устройств плавного пуска позволяет автоматизировать пусковой режим, но его главный минус остается – либо приходится закладывать в устройство возможность холостого хода электродвигателя, либо допускать кратковременные перегрузки сети, раскручивая мотор и нагрузку с кик-стартом.
Компоненты твердотельных устройств
 Выключатели питания, такие как SCR, которые подвергаются фазовому контролю для каждой части цикла. Для трехфазного двигателя два SCR подключаются к каждой фазе. Реле плавного пуска электродвигателя должны быть рассчитаны как минимум в три раза больше, чем линейное напряжение.
Выключатели питания, такие как SCR, которые подвергаются фазовому контролю для каждой части цикла. Для трехфазного двигателя два SCR подключаются к каждой фазе. Реле плавного пуска электродвигателя должны быть рассчитаны как минимум в три раза больше, чем линейное напряжение.
Рабочий пример системы для трехфазного асинхронного двигателя. Система состоит из 6 SCR, контрольной логической схемы в виде двух компараторов — LM324 и LM339 для получения уровня и напряжения рампы и оптоизолятора для управления приложением напряжения затвора к SCR на каждой фазе.
Таким образом, управляя длительностью между импульсами или их задержкой, управляемый угол SCR контролируется и регулируется подача питания на этапе пуска двигателя. Весь процесс на самом деле представляет собой систему управления с разомкнутым контуром, в которой контролируется время применения импульсов запуска затвора для каждого SCR.
Предохранители
Как и любые другие полупроводники, тиристоры необходимо защищать от перегрузки и короткого замыкания. Для защиты тиристоров от повреждения токами короткого замыкания обычно используются быстродействующие предохранители. Для их правильного выбора в технических характеристиках тиристорного модуля приводится параметр I2t, значение которого обязательно должно быть больше соответствующего значения в технических характеристиках предохранителя. При этом следует проверить, пользуясь временно-токовыми зависимостями, выдержит ли предохранитель максимально возможные для нашего устройства перегрузки.
Настройка параметров
Рассмотрим подробно для примера переднюю панель Софтстартера Toshiba TMC7, внешний вид которого показан в самом начале этой статьи.
Мягкий пускатель (SoftStarter) Toshiba TMC7 – передняя панель
Reset – сброс ошибок.
Trip codes – коды ошибок, которые индицируются в определенном количестве миганий светодиода Ready.
Вот количество миганий и соответствующая ошибка:
- Проблема с силовой частью
- Превышено время старта
- Перегрузка двигателя
- Перегрев двигателя
- Дисбаланс по фазам
- Частота на входе вышла за пределы 40…72 Гц
- Ошибка чередования фаз
- Ошибка связи (в случае применения дополнительного модуля)
Current Ramp – Нарастание тока при запуске, в процентах и в секундах.
Motor FLC – ток двигателя, в процентах от номинала мягкого пускателя. Параметр защиты двигателя.
Current limit – ограничение тока во время старта
Soft Stop – время мягкого останова. 0 – выбег двигателя (отключение питания, вращение по инерции)
Motor Trip Class – Класс термозащиты двигателя. Чем выше значение, тем медленнее сработает тепловая защита двигателя при перегрузке
AUX relay, Phase rotatoin – функция внутреннего реле, защита от смены фаз от неправильного вращения
Excess Start Time – Превышение времени старта. Двигатель за данное время не смог развить номинальную скорость. Требуется увеличить уровень ограничения тока.
По контактам управления.
С1, С2 – клеммы подключения термистора двигателя. Если термистора нет, устанавливается перемычка.
R33…R44 – выходы функциональных реле
02, 01 – подключение кнопок управления
А2, А1, А3 – выходы для питания цепей управления и контрольных цепей схемы софт стартера.
Способы пуска асинхронных электродвигателей
Для запуска асинхронных двигателей используется разные методы. На практике наибольшее распространение получили следующие способы: Б.
- Изменение конструкции электродвигателей (роторы с глубокими пазами, типа “двойная беличья клетка”).
- Прямой пуск.
- Запуск на пониженном напряжении.
- Частотный пуск.
Двигатели специальной конструкции существенно дороже обычных электрических машин, что сильно ограничивает их применение.
Прямой запуск
Самая простая схема пуска асинхронных электрических машин с короткозамкнутым ротором – непосредственное подключение к сети. Подача напряжения на статорные обмотки осуществляется замыканием силовых контактов магнитного пускателя или контактора.

При прямом пуске электрической машины момент силы на валу значительно меньше номинального. Кроме того, запуск на полном напряжении вызывает броски тока и снижение напряжения. Прямой запуск применяется:
- При низкой мощности электрической машины.
- Для технологического оборудования, не нуждающегося в плавном разгоне.
- Для механизмов с запуском без нагрузки.
Такой способ непригоден для приводов инерционного оборудования, устройств нетребовательных к величине пускового момента, при ограниченной мощности электросети.
Пуск на пониженном напряжении
Запуск асинхронных электрических машин на сниженном напряжении реализуется при помощи нескольких схем:
Переключением обмоток статора “звезда-треугольник”.
Подключением через трансформатор.
Включением в цепь обмоток статора пусковых резисторов или реакторов.
Принцип действия первой схемы основан на пуске электрической машины при подключении обмоток “звездой”. После разгона двигателя коммутационные аппараты переключают их на “треугольник”. Этим достигается 3-х кратное снижение пускового тока.

При этом пусковой момент на валу также снижается более чем на 30%. Кроме того, преждевременное переключение также вызывает скачки тока до величин, возникающих при прямом запуске. Такой способ также непригоден для инерционного оборудования и установок, запускаемых под нагрузкой.
Для устранения недостатков электродвигателей с короткозамкнутым ротором также применяют автотрансформаторные схемы пуска.

При этом устройство для преобразования напряжения включают последовательно в цепь обмоток электрической машины. Эта схема обеспечивает плавный разгон и уменьшение пускового тока. Через автотрансформаторы подключают приводы мощных установок и оборудования со значительным моментом сопротивления.
Высокая стоимость элементов схемы, скачок тока при переходе на полное напряжение ограничивают ее применение.
Широко применяются также реакторные и резистивные схемы пуска. Для снижения напряжения к обмоткам последовательно подключают резисторы или катушки, обладающие реактивным сопротивлением. Запуск осуществляется при включении в цепь последовательно включенных элементов с активным или индуктивным сопротивлением.

При разгоне двигателей реакторы и пусковые сопротивления постепенно шунтируются и выключаются из цепи. Недостатком этого метода является высокая стоимость оборудования, значительно сниженный пусковой момент.
Частотный пуск
Такой способ старта и разгона основан на зависимости момента и скорости вращения вала электродвигателя от частоты питающего напряжения на обмотках. Для изменения этой характеристики применяют частотные преобразователи. Запуск через ПЧ решает все проблемы старта и разгона асинхронного электродвигателя. Однако, эти устройства имеют высокую цену, большие габариты, а также являются источником высших гармоник.
Что происходит при пуске асинхронного двигателя
Для понимания того, какое устройство применить для плавного пуска электродвигателя, надо знать принцип его работы. Самые распространенные двигатели – асинхронные с короткозамкнутым ротором. Их простая конструкция и соответствующая надежность и обусловили популярность этих электрических машин. Хотя ротор вращается, и его форма оптимизирована под этот процесс, он – не что иное, как вторичная обмотка трансформатора.
А, как известно, если в первичной обмотке течет ток, то в ее сердечнике появляется электромагнитное поле. Перечисленные функции в асинхронном движке выполняет статор. Его магнитное поле, которое, в отличие от трансформатора, вращается вокруг ротора, индуцирует в нем токи, связанные с этим вращением. И чем больше разница скоростей поля и ротора, тем больше ток в последнем. Ведь ротор – это обмотка, замкнутая накоротко. А раз существует трансформаторная связь, значит, токи в обмотках зависимы прямо пропорционально.
Теперь перечислим условия, которые существуют при пуске асинхронного двигателя, питающегося от промышленной сети. Сначала рассмотрим трехфазный вариант:
- неизменное напряжение;
- неизменная частота;
- ротор в состоянии покоя.
Присоединение асинхронного движка к электросети мгновенно создает вращающееся магнитное поле. При этом разница скоростей его и ротора (так называемое скольжение, выражаемое в процентах от скорости вращения электромагнитного поля статора) получается максимальной. И, как следствие этого, – как бы режим короткого замыкания трансформатора. Если мощность движка велика, пусковые токи получаются на уровне тех, что для трансформаторов аналогичной электрической мощности считаются аварийными.

Схема прямого подключения к сети асинхронного двигателя и зависимость силы тока статора от скорости вращения ротора
Какое устройство применить для их ограничения, вполне понятно. Оно должно:
- либо уменьшить величину напряжения на обмотках статора на время разгона ротора;
- либо раскрутить ротор до присоединения статора к электросети.
- Также можно внести конструктивные изменения в асинхронный двигатель.
Выбор УПП
Выбор софт-стартера делается при проектировании или модернизации электропривода. При этом учитываются требования к оборудованию, характеристики электросети и другие условия. Главными критериями являются:
Ток, напряжение и мощность электрической машины. Необходимо чтобы максимально возможный ток при пуске не превышал предельную величину тока УПП. Напряжение и мощность устройства должны соответствовать характеристикам двигателя.
Количество стартов и остановок. Этот параметр указан в технической документации УПП, он должен отвечать условиям работы электропривода.
Величина пускового момента. Интервал настраиваемых значений должен включать необходимую величину допустимого момента при запуске оборудования.
Электромагнитная совместимость. Все электрооборудование привода должно иметь одинаковый класс ЭМС.
Допустимое время разгона и торможение двигателя.
При выборе также принимаются во внимание наличие функций динамического торможения, защиты от ненормальных режимов работы, поддерживаемые интерфейсы связи
Заключение
УПП разработаны и созданы, чтобы ограничить увеличение пусковых технических показателей двигателя. В противном случае нежелательные явления могут привести к повреждению агрегата, сжиганию обмоток или перегреву рабочих цепей
Для длительной же службы, важно чтобы трехфазный мотор работал без скачков напряжения, в режиме плавного пуска
Как только индукционный мотор наберёт нужные обороты, посылается сигнал к размыканию реле цепи. Агрегат становится готов к работе на полной скорости без перегрева и сбоев системы. Представленные способы могут быть полезными в решении промышленных и бытовых задач.
Список источников
- drives.ru
- www.kit-e.ru
- all-pribors.ru
- instart-info.ru
- infoelectrik.ru
- eltechbook.ru
- elektro.guru
- domelectrik.ru
- SamElectric.ru
- 220v.guru
- ElectricDoma.ru




















